2017年10月07日
コンピュータープログラマが自転車世界最速チャレンジをサポートしてきた話

Photo:Aerovelo
自転車の世界最速記録をご存知ですか? Todd Reichert氏がAerovelo Etaを駆って2016年に樹立した時速144.17km(時速89.59マイル)が世界記録です。この記録に挑戦すべく日本から参戦したTeam Super Kettaに情報分析スタッフとして参加して、世界記録を目指すチームとアスリートをITでサポートしたお話。
WHPSCとは?
ネバダ州バトルマウンテンで行われるWorld Human Powered Speed Challenge(以下 WHPSC)は人力だけによる自転車の世界最速記録に挑戦する大会です。砂漠地帯の平坦な5マイル(8km)の直線路を助走して計測区間200mの通過時間で速度を測る”200mフライングスタート”という形式の世界記録に挑みます。
WHPSCは6日間の日程で予選の2.5マイルランと、本戦の5マイルランが行われます。予選2.5マイルランで時速45マイル(72.42km/h)以上を記録したライダーが、より長く加速時間がとれる5マイルランで世界記録に挑戦できます。さらに時速60マイル(96.56km/h)以上の実績のあるライダーは、気温が高くよりコンディションの良い夕方の5マイルランを走る権利が得られます。
- 朝の予選2.5マイルランで時速45マイル(72.42km/h)以上が本戦5マイルランへ
- 朝の本戦5マイルランで時速60マイル(96.56km/h)が、より条件の良い夕方の本戦5マイルランへ
- 夕方の本線5マイルランで世界記録へ挑戦
走行枠が限られているので、速いライダーに優先的に走行枠の選択権が与えられます。そして記録が認定される条件として、計測時の風速が1.67m/s以下の”リーガルウィンド“であることが求められます。
使用する機材
WHPSCで使用する自転車の多くは、ストリームライナーと呼ばれるカウルを備えたリカンベント形式のバイクです。近年は空気抵抗をさらに軽減するために、窓を設けずにビデオカメラを介したモニター越しに走る”カメラバイク”が主流になっています。

日本から参加したTeam Super KettaはNHKのテレビ番組”超絶 凄ワザ!”の企画で2016年に結成されたチームで、東レ・カーボンマジック株式会社がオートクレーブ成形法の(いわゆる)ドライカーボンで仕立てあげた速度記録挑戦用の自転車”Super Ketta Machine 162“を使用します。
Super Ketta Machine 162は流体解析と風洞で空気抵抗を削ぎ落とした、ドライカーボンによる強靭で軽量なモノコックボディを備え、内部の駆動系も炭素繊維強化プラスチック製で総重量は約28kgです。
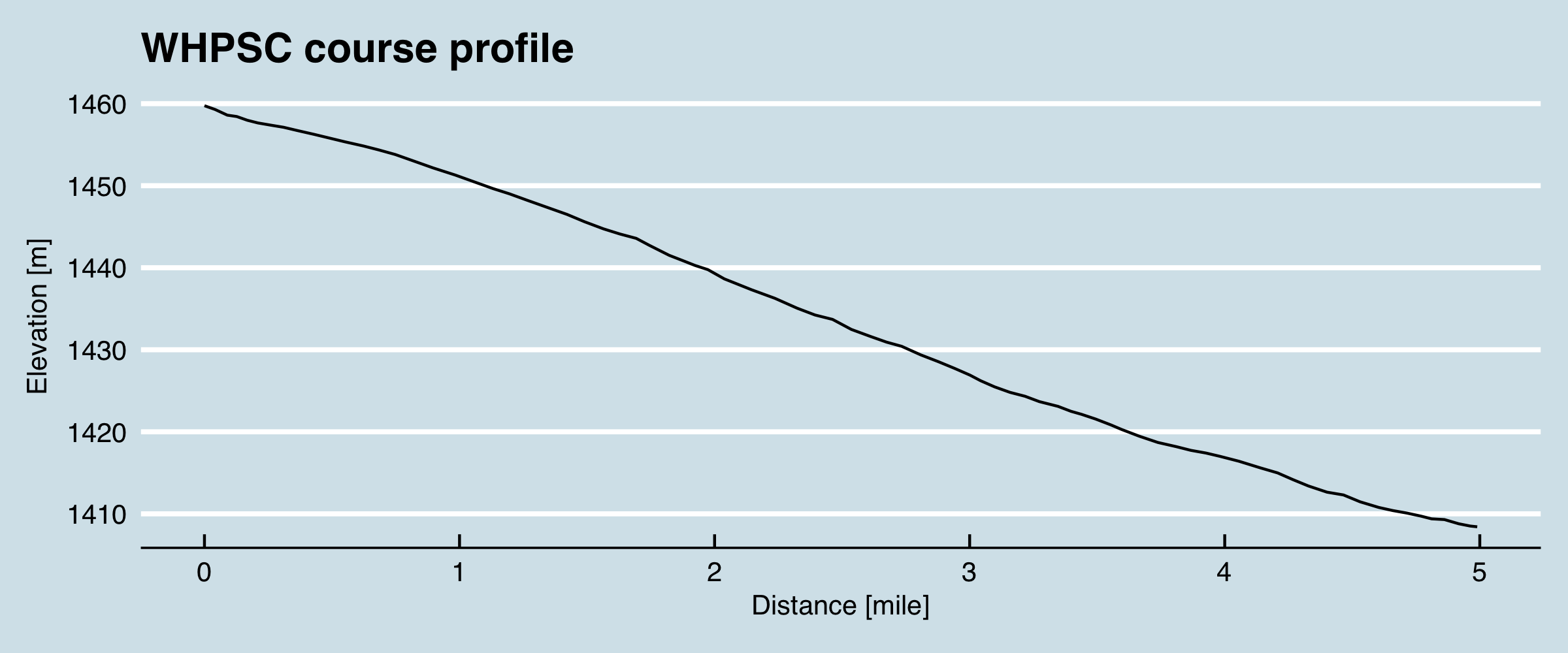
ちなみにバトルマウンテンのコースには平均-0.6%の極めてわずかな傾斜があり、理論上はまったくペダルを漕がなくてもゴール地点では50km/hを越すというスーパーバイクです。
非常に高性能なバイクですが元々がテレビ番組企画のチームということで、大会関係者は「日本チームは速かったけど来年は来ないだろうなぁ……」と思っていたそうです。しかし、有志が集い新しいパイロットとともにチームを再結成。東レ・カーボンマジック株式会社保有のSuper Ketta Machine 162を携え2017年大会に参戦してきました。
課題

PHOTO:Aerovelo
自転車で時速100km超でも安全に走行できる道路ってないですよね。つまり準備段階の国内では試走のたぐいは基本的にできません。昨年は日本自動車研究所の広大なテストコースで時速100kmに迫る速度でテストしていましたが、今年は自費参戦なので予算的に無理でした。国内でできるのはスタートの練習だけで、高速走行は現地でぶっつけ本番になります。
そして通常の自転車ではありえない時速100kmを超える速度と、200mフライングスタートという競技形態も問題です。通常の自転車ロードレースやケイリンは「他の選手を出し抜いて一番最初にゴールラインを通過するゲーム」です。それに対して200mフライングスタートは「長い加速区間をうまく使って可能なかぎり高速で計測区間を通過するゲーム」です。
パイロットにとって時速100km以上の自転車走行、しかもカメラ越しに走るというのは普段経験しようがありません。時速144kmでは1kmは25秒、200mはわずか5秒で過ぎ去ってしまいます。普段乗る自転車とはまったく異なるスピード感と距離感のなかで「どのタイミングでスパートすれば最も速くなるのか?」「苦しいけどあと何秒我慢すればゴールできるのか?」「ってかこのタイミングだと加速が間に合わなくない!?」などなどを想像することは困難です。計測区間への8kmのアプローチをどんなペースで、どんな走り方をすると記録が高まるのか? そしてどうやってパイロットに速い走りの感覚・距離感を身につけてもらえばいいのでしょうか?
情報分析スタッフとしての仕事
いろいろな走り方をバーチャルに試せるシミュレーターがあれば、現地での貴重な走行枠を浪費せずに経験を積むことができます。走行する自転車の物理モデル、現地コースの環境モデル、ペダルを回す物理量を測定して無線送信する自転車パワーメーターのデータ。これらを元にリアルタイムに物理シミュレーションを実行して経過をグラフィカルに見せてあげるWHPSCシミュレーターを開発しました。
さらに、シミュレーターでパイロット自身がいろいろ試せるようにしたうえで、どう走ったら本当に速いのか、パイロットによる試行錯誤と並行して、この「離散的な組み合わせ最適化問題」をコンピューターに解かせます。
物理モデル
走行する自転車には空気抵抗・転がり抵抗・勾配抵抗がかかり、駆動力からこれら走行抵抗を差し引いた力が車体の加速度を決定します。パワーメーターから受信した駆動力、走行位置、速度、勾配、大気密度、風速etc..を元にニュートンの運動方程式で加速度を算出して走行位置と速度を逐次更新しながらシミュレーションは進行します。
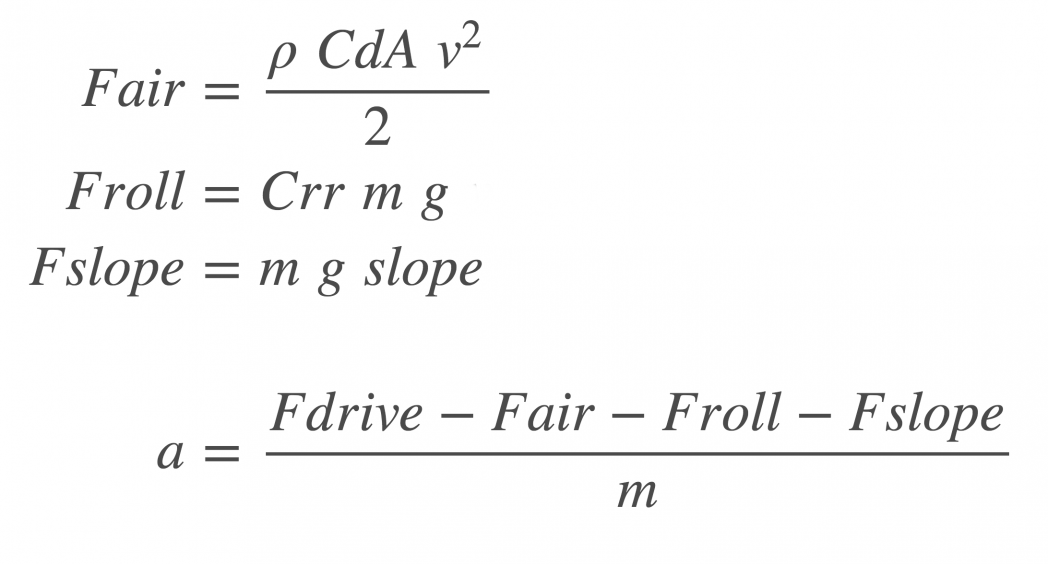
物理モデルの特性を決める各パラメーターは昨年の設計開発時の流体解析と風洞実験の結果と、実際の走行記録をもとに設定しました。
環境モデル
平均-0.6%の緩やかな下り勾配は均一ではなく、場所によって勾配が変化しています。大会主催者によって0.5マイルごとの平均勾配を公開していますが、もっと細かく勾配を調べれば隠れた頑張りどころが見つかるのではないか? という目論みでUSGSアメリカ地質調査所が公開している標高データをもとにした詳細な勾配データを用意してシミュレーションに使いました。結果、勾配変化は記録にあんまり影響なかったです。まじかよ。
また、1400mの準高地なので気圧は低く大気密度が低くなります。が、砂漠地帯なので湿度が低いために大気密度は上がり、それに反して気温が高いため大気密度は下がります。高速走行中は空気抵抗が支配的になるので、大気密度の値は記録に大きく影響します。しかしコース最寄りの気象データは昨年以前のものが取得できませんでした。そのため現地の一般的な天候での海面気圧、気温、標高、湿度をもとに、現地の大気密度を算出してシミュレーションに使用しました。
ちなみに平坦路の走行抵抗の内訳を概算したところ、時速にして92km/h(仕事量は240w)で、すべての抵抗のうち空気抵抗は60%, 115km/h(仕事量401W)で70%, 130km/h(仕事量596W)で75%, 世界記録の144km/h(仕事量702w!!)付近で80%という数値が算出できました。
疲労モデル
ヒューマンによるパワードなスピードのチャレンジなので、自転車を漕ぐパイロットの体力と疲労特性も記録に強く影響します。パイロットの体力・疲労特性を定量化する手法と指標がいろいろありますが、今回はCritical PowerとW Prime Balanceという疲労モデルでパイロットの体力をモデリングしました。
かいつまんで説明すると、パイロットが疲労ぜずに安定して発揮できるパワーを示すCritical Power(CP)と、瞬発的に発揮できるエネルギーの備蓄量を示すW Prime(W’)をもとに、その時点で発揮できるパワーと持続時間の関係をモデル化しています。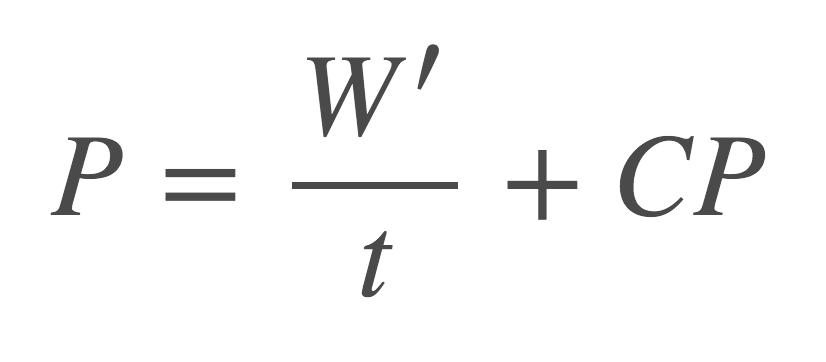
Team Super Kettaのパイロット香西真介選手はロードレーサーとして普段から自転車パワーメーターを用いたトレーニングをしているので、必要なパラメータはすでに把握できていました。しかしリカンベントの乗車姿勢ではロードバイクよりもCPとW’が低下するので、シミュレーターの利用しながらパラメータを修正しました。
ペース配分最適化問題
最速で最適なペース配分は「離散的な組み合わせ最適化問題」ですが、前出の物理・環境・疲労モデルを統合すれば遺伝的アルゴリズムで準最適解のベターなペース配分を求めることができます。
筆者が用意した各モデルと遺伝的アルゴリズムの探索結果から、最適なスパートタイミングの枠(“ローンチウィンドウ”)の存在が判明しました。ごく短い爆発的なスプリントが得意なパイロットから、ロングスパートが得意なパイロットまで、同じ疲労プロフィールを持っていれば同じように記録を最大化できる走り方の幅です。もちろんローンチウィンドウ内でもスパートを始めるタイミングによって、パイロットに要求されるパワーと持続時間の関係は刻々と変化するので、ここでもシミュレーターによるリハーサルが重要になります。
未来予測の提示
このローンチウィンドウ内でどのような走り方をすべきか。シミュレーターでは現状のペースを維持した場合の終端速度と持続時間に加えて、「もしもいま最大努力でスパートしたら、どのくらいのパワーで何秒のスパートになって、終端速度は時速何kmになるか?」という未来予測をリアルタイムにレポートしています。スパートで要求されるパワーと持続時間は、こちらもシミュレーションで疲労しない上限のパワーを探索します。この探索空間は1000パターン程度ですが、未来予測はリアルタイムにレポートしたいので試行回数が5回に収まるようバイナリサーチを使用しています。
さらに疲労モデルを用いたオーバーペース検知も盛り込みました。パイロットがオーバーペースで走っている際には「このペースだとどの地点で失速して、終端速度は時速何kmに落ち込む」を警告表示しています。
これらのリアルタイムな未来予測フィードバックによってパイロットは、この走り方をすると何が起こるか? スパートするならいつか? 爆発的なスプリント? それとも少し抑えたロングスパート? どれくらいのパワーで何秒? などなど、パイロットが実際に試行して疲労する前にかなり正確に把握することができます。
WHPSCシミュレーターへの統合
これらモデルと最適化による知見と未来予測を統合したシミュレーターをmacOS用アプリとしてSwiftで記述しました。それぞれのモデル・シミュレーション・最適化の実装は、筆者がC言語で記述した実装がすでにあったので、基本的にはSwiftへの移植作業と、macOSアプリとしての体裁を持たせる作業で完成しました。自転車パワーメーターのデータを無線で受信するためのANT Wireless SDKはC言語のライブラリとして提供されているので、ブリッジヘッダーを介してSwiftから利用できます。Swift超便利。
現地でのアレコレと次回への展望
大会後半の5マイルランでは横風が強いなかで記録を出さなければならない状況がありました。走行安定性が著しく低下し、パイロットは車体を前に進める努力以上にコース上に車体をとどめる努力が要求される過酷な状況だったようです。このような状況でもローンチウィンドウのゴールから遠い位置からロングスパートする選択により、操縦に集中する余地を残しつつ記録を最大化できる可能性があります。
また、様々なアクシデントとトラブルで、なかなか予選が通過できずチームにプレッシャーがのしかかる中、急遽2.5マイル版のシミュレーターを用意して「リラックスして走れば余裕で予選を通る」ことを提示できたり、搭載していた市販のサイクルコンピューターがデータを取りこぼして速度のログが得られず公式発表まで記録がわからなかった際に、自転車パワーメーターのログを元に再シミュレーションして欠損情報を補完して提示できたのも分析スタッフの仕事として良かったポイントだと思っています。

レース自体の現地でのアレコレはパイロットの香西真介選手のレポートと、Team Super KettaのFacebook Pageをご覧ください。
将来的には練習用シミュレーターから一歩進んで、同様の未来予測をオンボードコンピュータで提供したいと考えています。そしてカーボンのモノコック内に電波を発する電子機器を複数持ち込むと、わりと大変なことになることが判明したので、カメラモニターの駆動、走行情報の提示、未来予測、ロガー類を、冗長性を確保しつつ一本化(独立2系統なので二本化?)できないか検討を始めています。
ちなみにパイロットの香西選手も本業はプログラマーなので、むこうのタイトルは「プログラマーの俺が自転車速度世界記録にチャレンジしてきた」とパワーワードすぎる感じになるのは秘密です。
参考文献
* Aerovelo Eat Project http://www.aerovelo.com/eta-speedbike
* “Introduction to fluid mechanics”, Robert W. Fox and Alan T. McDonald
* “The Kinetics of the Work Capacity Above Critical Power”, Skiba PF, Fulford J, Clarke DC, Vanhatalo A, Jones AM
* “Optimal Race Strategy for a 200-m Flying Sprint in a Human-Powered Vehicle”, Jos J. de Koning, Cees-Jan van der Zweep, Jesper Cornelissen, and Bouke Kuiper
* “Adaptation in Natural and Artificial Systems” John H. Holland
* ANT Wireles https://www.thisisant.com/developer/resources/downloads/
* Swift https://swift.org
写真:小山浩之、Aerovelo 文:小山浩之
著者プロフィール
小山 浩之(おやま ひろゆき)●コンピュータープログラマときどき文筆家。シクロクロスと個人タイムトライアルを愛するお一人様系ホビーサイクリスト。数理最適化と計算科学・ITでアスリートのパフォーマンスをサポートする合同会社アヘッドスポーツエンジニアリング代表社員。


著者プロフィール
小山浩之おやま ひろゆき
コンピュータープログラマときどき文筆家。シクロクロスと個人タイムトライアルを愛するお一人様系ホビーサイクリスト。数理最適化と計算科学・ITでアスリートのパフォーマンスをサポートする合同会社アヘッドスポーツエンジニアリング代表社員。